自動運転 - 自己位置推定
Autonomous Driving - Self-Localization
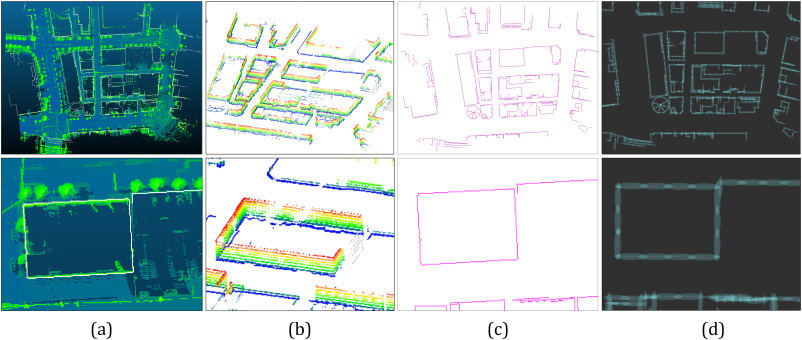
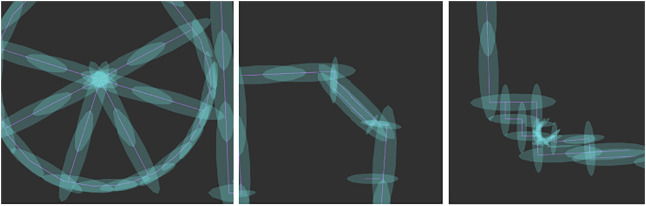
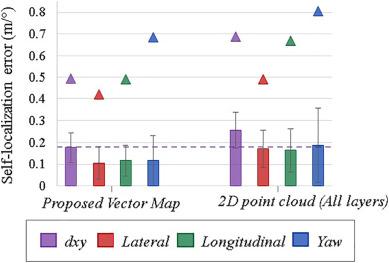
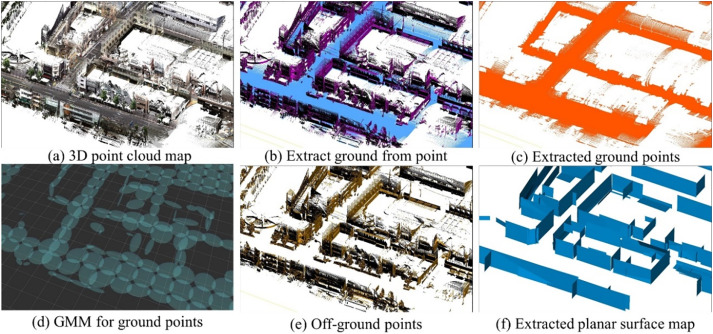
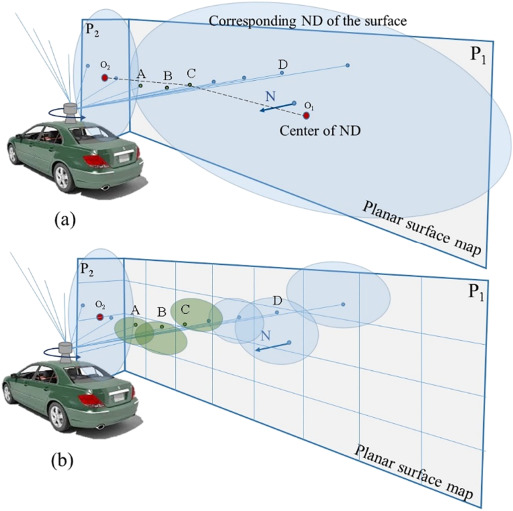
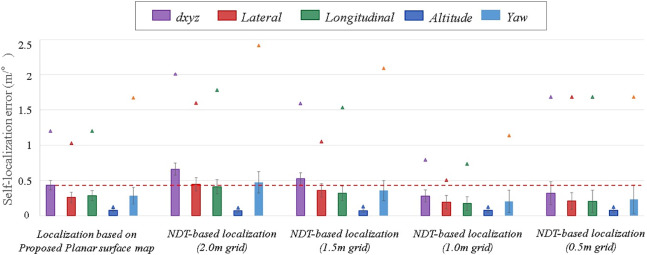
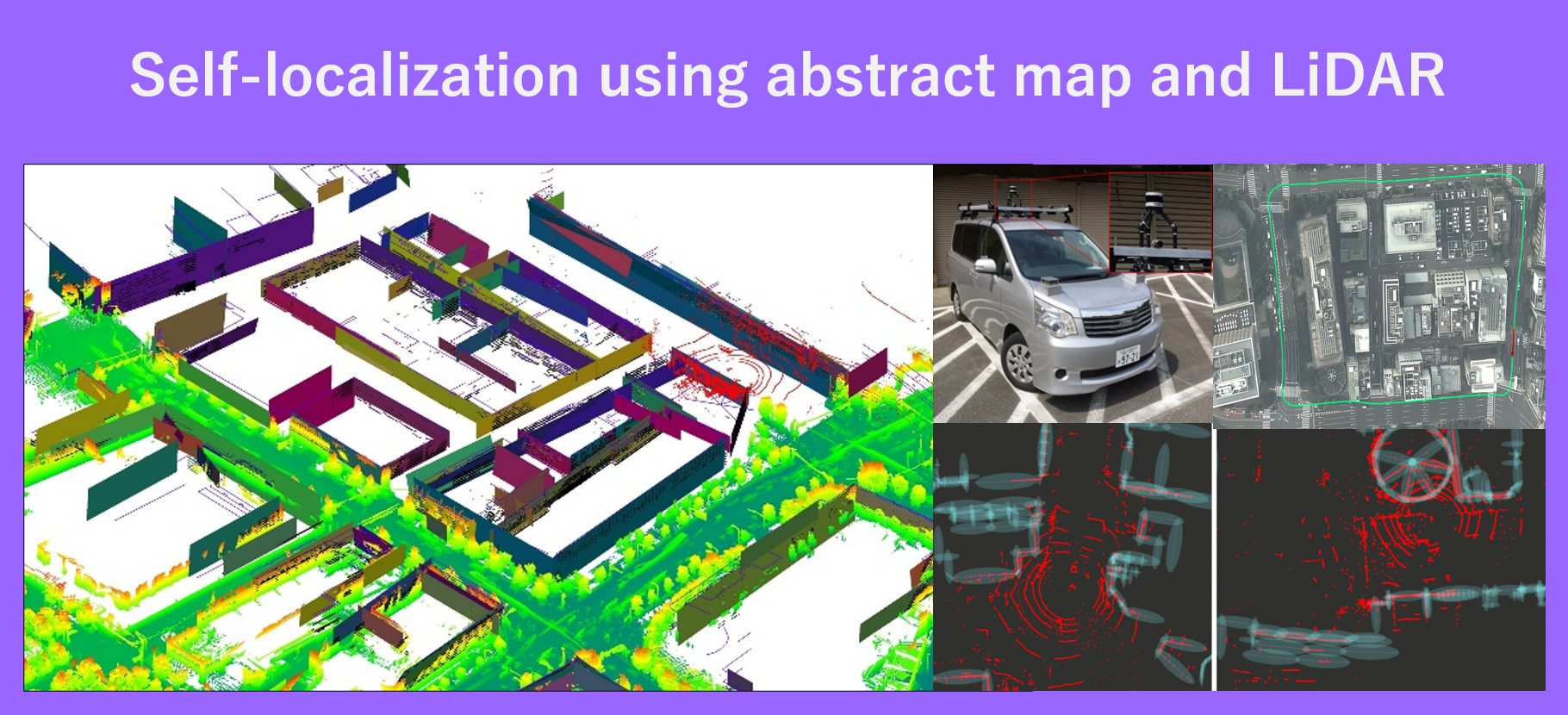
自動運転のためには、正確な車両の自己位置推定が重要です。 全地球測位衛星システム(GNSS)に基づく自己位置推定技術では、都市部の峡谷において要求される精度を達成することができません。 一方、SLAMによる手法では、蓄積誤差が問題となっています。最先端の自己位置推定手法では、3DLidarを用いて周囲の環境を観測しその観測結果を事前に作成した3D点群マップと照合して地図内での車両の位置を推定します。 しかし、膨大な点群を格納するためには車両内に膨大に貯蔵できる内蔵ストレージが必要になるか、複数の車両による地図の同時ダウンロードが課題となっているサーバに格納することが必要です。 そこで、本研究では点群をそのまま先行地図として利用するのではなく抽出が容易でかつLidarで観測可能な建物の抽象的な地図に着目しました。 特に、都市部を表す2種類の抽象地図のフォーマットに基づいている車両の自己位置推定手法を提案しています。 第一の形式は、建物の境界をベクトル(線)で表現した建物の足跡による多層の二次元ベクトル地図です。 第二の形式は、建物と地面の平面的な表面地図です。 これらの地図フォーマットは、各ベクトルや平面の不確かさ(偏差)を計算して地図に含めるという点で共通しています。 そして、これらの地図に基づくlocalizationにおいて、Lidarの観測データと抽象地図を照合して車両の正確な位置を求めました。 東京の密集した都市部での実験では、地図サイズを大幅に縮小しても位置推定の平均誤差を維持できることを示しました。
Accurate vehicle self-localization is significant for autonomous driving. The localization techniques based on Global Navigation Satellite System (GNSS) cannot achieve the required accuracy in urban canyons. On the other hand, simultaneous localization and mapping (SLAM) methods suffer from the error accumulation problem. State-of-the-art localization approaches adopt 3D Light Detection and Ranging (Lidar) to observe the surrounding environment and match the observation with a priori known 3D point cloud map for estimating the position of the vehicle within the map. However, storing the massive point cloud needs immense storage on the vehicle, or it should be stored on servers, which makes the simultaneous downloading of the map by multiple vehicles another challenge. In this study, rather than employing the point cloud directly as the prior map, we focus on the abstract map of buildings, which is easy to extract, and at the same time apparently observable by Lidar. More especially, we proposed vehicle localization methods based on two different abstract map formats representing urban areas. The first format is the multilayer 2D vector map of building footprints, which represents the building boundaries using vectors (lines). The second format is the planar surface map of buildings and ground. These map formats share the same idea that the uncertainty (deviation) of each vector or planar surface is calculated and included in the map. Later in the localization phase, the observed data from Lidar is matched with the abstract map to obtain the precise location of the vehicle. Experiments conducted in a dense urban area of Tokyo show that even though we significantly shrank the map size, we could preserve the mean error of the localization.